*** 출처: [LGERI] 딥러닝 기반의 인공지능 자율주행 기술 경쟁의 핵심을 바꾼다
1. 딥러닝 기반의 자율주행 혁신의 시작
■ 실리콘밸리의 Startup인 comma.ai
- “사람이 운전하면 자동차가 주행하는 방법을 스스로 깨우친다”.
- 실제 comma.ai는 지난 2016년 3월 이러한 방법으로 4주만에 자율 주행 학습이 가능한 인공지능을 만들어 자동차에 탑재했으며 10시간 동안의 학습으로 기본적인 자율주행 기능을 구현해 냈다. 고가의 특화 센서를 사용하지 않고 총 $1000 이하의 범용 센서만으로 딥러닝 기반 자율주행 기술을 개발하는 것을 목표로 하고 있다.
- 단 4명의 개발 자가 4주만에 딥러닝을 활용해 구현해 낸 것이다.
■ 딥러닝을 적용해 기존 자율주행 개발 패러다임을 혁신한 것
- 즉 자율주행 자동차 구현의 핵심이 특화 센서와 자동차 업계의 전문가에서 딥러닝 전문가와 주행 과정을 학습 시킬 수 있는 데이터로 이동하고 있는 것
2. 인공지능 기술의 자율주행 적용
■ 시각 인식 지능의 적용
- 실제 Nvidia 등 일부 기업들의 현재 구현되는 시각 인식 관련 기술 시연에서는 인간의 시각으로는 인식하기 어려운 물체들까지 인공지능이 더 높은 성능으로 인식해 내기도 하고 있다.
- 실제 AutoX라는 신생 벤처 기업은 다른 센서에는 전혀 의존하지 않고 오직 카메라를 통해 입력된 영상 정보만으로 자율주행 기능을 구현한다. 6개의 카메라를 통해 입력되는 자동차 주변 환경 정보를 딥러닝으로 학습한 시각 지능이 마치 사람처럼 주변을 인지하고 자동차를 제어한다.
■ 학습 지능의 적용: 사람처럼 주행하며 배우기
- 딥러닝 기반의 인공지능이 장착된 차량을 사람이 운전하면 인공지능이 운전자의 주행 과정을 관찰하며 운전하는 방법을 스스로 학습해 간다.
- 사람이 주행을 해가며 운전을 배워가는 과정과 같이 인공지능이 많은 주행 데이터를 학습할 수록 자율주행 기능의 완성도가 높아지게 된다. 여기서 많은 양의 주행 데이터는 단순히 오랜 시간의 주행 데이터 보다는 다양한 주행 환경 및 상황에서 사람들이 반응하는 과정이 포함된 다양한 데이터를 의미한다.
- 즉 안정적인 주행이 지속되는 상황의 데이터를 많은 양으로 확보하기 보다는 각종 위험상황 과 예측하기 어려운 상황에 대응하는 것과 같은 다양한 상황의 주행 데이터를 확보하는 것이 더욱 중요한 의미를 갖는 것이다.
- 따라서 딥러닝 기반의 자율주행 구현 방식은 인공지능, 특히 딥러닝 관련 역량과 주행 데이터가 핵심적인 역할을 하게 된다.
■ 강화학습(Reinforcement Learning)의 적용: 스스로 규칙을 터득하기
- 특히 기존 방법으로 모델링이 어렵고 주행 데이터 확보의 제약으로 인해 충분한 학습이 어려운 분야에 우선적으로 시도되고 있다.
- 신호등이 없는 교차로, 비보호 좌회전, 우회전, 램프 진입 등과 같은 경우들은 차량 주행 시 매우 빈번하게 발생하지만 차량 들의 진입 속도, 진행 방향, 교통량 등 다양한 변수들이 매 순간 매우 다양한 경우의 수로 발생한다. 이러한 상황들에서 인간은 오랜 운전 경험이나 직관에 의존해 상황을 판단하거나 충돌위험이 발생하더라도 즉각적으로 반응해 위험 상황을 회피하기도 한다. 하지만 이러한 과정을 인간이 일일이 개입해 규칙기반 방식의 인공지능으로 구현 하거나 제한된 데이터를 통한 학습만으로 구현해 내기는 매우 어렵다.

■ 사람처럼 사고하는 지능의 적용
○ 인간처럼 생각하며 주행하는 자율주행 지능의 구현 가능성
- 관계형 추론(Relational Reasoning)이 가능한 인공지능의 구현
- 관계형 추론 방식이 자율주행 기능에 적용 되면 자동차는 차량 주변의 사물들을 개별적으로 인식하지 않고 각 사물 들 사이의 상대적인 관계를 직관적으로 인식해 낼 수 있게 된다. 마치 사람이 운전을 할 때와 같이 주 변에 존재하는 차량들 간의 거리를 각각 개별적으로 인식하지 않고 서로간의 상대적 거리와 속도를 종합 적으로 인지해 주행하는 것과 마찬가지 인 것이다.

- 상호 관계의 관찰에 기반한 예측/추론
- 이와 같은 관계형 사고에 기반한 예측이 가능하다면 마치 사람처럼 주변 차량들을 관찰하고 향후 움직임을 예측해 특정 차량에 대해 미리 주의를 하거나 위험 차량을 사전에 회피하는 것도 가능해 지는 것이다.


○ 주행 지능의 이식
- 지능의 이식(Transferring Intelligence) 관련 연구 또한 자율주행 기술에 적용 가능한 매우 유망한 최신 기술이다.
- 유사한 기능을 수행하는 인공지능이 이미 존재 한다면 기존의 지능을 새로운 인공지능에 이식해 활용하는 기술이다.
- 차량 주행 환경은 국가별, 지역별로 주행 법규 및 교통 인프라가 매우 상이하기 때문에 하나의 자율주행 기술이 모든 국가에 범용적으로 적용되기는 매우 어렵다. 그렇기 때문에 자율주행 기능이 특정 지역에 국한하지 않고 어느 국가나 지역으로도 쉽게 확장 가능하도록 시스템을 구현하는 것이 향후 큰 이슈로 부상할 가능성이 높다. 이러한 의미에서 현재 인공지능 분야에서 연구되고 있는 지능의 이식 관련 연구는 향후 자율 주행 기술의 확산에 큰 역할을 할 것으로 전망된다.

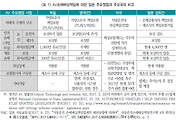
■ 주요 연구소 및 기업 동향

'IT 와 Social 이야기' 카테고리의 다른 글
| [kotra] 중국 스마트 스피커 시장동향 (0) | 2017.11.28 |
|---|---|
| [NIA] 머신러닝 전문가가 예측하는 인공지능의 미래와 공공서비스 방향 - 백인수 수석, 황현주 연구원 (0) | 2017.11.28 |
| [kiri] 일본의 자율주행자동차 사고에 대한 손해배상책임 논의의 주요쟁점 - 이기형 선임연구위원 (0) | 2017.11.27 |
| [구영현] 인공지능-빅데이터 기술 개발 과정에서의 데이터 수집 및 정제 (0) | 2017.11.24 |
| [NIA] 지능화 시대 'Civic Tech'의 발전과 디지털 사회혁신 전략 - 신은희 책임 (0) | 2017.11.23 |